编码器
旋转编码器(rotary encoder)是将旋转位置或旋转量转换成模拟或数字信号的机电设备,一般安装在旋转物体中垂直旋转轴的一面。
旋转编码器可以分为绝对型(absolute)编码器和增量型(incremental)编码器两种。
具体介绍请自行查看百科旋转编码器
1-1 队内编码器介绍
队内常用编码器如下:
| 队内俗称 | 编码器类型 | 编码器线数 | 厂商 |
|---|---|---|---|
| 光电编码器 | 增量式 | 1000 | |
| 小增编 | 增量式 | 4096 | Accnt |
| 小磁编 | 增量式 | 4096 | Accnt |
| 大增编 | 增量式 | ||
| 方形编码器(AS5047) | 绝对式&增量式 | 1000 | 永钢 |
| 大绝编 | 绝对式 |
①光电编码器用于原本的RE电机和EC电机,其他电机不再使用。此种编码器简单经济,不过我们的接线方式非常容易掉,易发生危险。 ②小增编是19年开始使用的一种磁编码器,依靠检测磁场方向得到编码器脉冲。当时用于大四足U10电机。但因其自带轴"大屁股"空间占用较大为之诟病。现在已经基本弃用。
③小磁编是在小增编基础上依然在Accnt购买的一款不带外壳的磁编。需要自行用打印件安装。
④大增编
⑤方形编码器是从永钢买的用于VESC的绝对值编码器,自带5V及3.3V转换接口。
⑥大绝编用于19年发射拐骨那辆车的底盘转向电机。
1-2 基于脉冲式编码器的测距、测速和测加速度方法
伺服电机控制时需要获得其准确的电流、速度及位置信息。通常使用电调或驱动器会有运行信息反馈。但有时会有例外,比如大多数都不会反馈绝对距离而是单圈脉冲,比如RM6025不会反馈速度信息。更退一步,当使用自己的电机驱动板控制电机时,需要自行计算所有参数。
而编码器是最常用的位置传感器,通过一定的处理可以获取想到的数据。
Ⅰ测距
假设编码器每转脉冲数为P,时钟频率为f,M1,M2分别是对编码器脉冲和时钟脉冲进行计数的计数值。
通过计算两次定时器频率之间的编码器脉冲数误差,并在时间尺度上累计,便可得到总编码器脉冲数,并换算到电机轴后总圈数。
\(M_1 =\int^{T}_{0}{\Delta M_1dt}\)
唯一需要注意的只是编码器数值溢出如何处理。
\(if\quad|\Delta M_1|>\frac{P}{2}\qquad then \qquad\Delta M_1-=sgn(\Delta M_1)*P\)
由此可知电机最大速度 \(V_{max}\leq\frac{60f}{2}\)
Ⅱ测速
1.M法
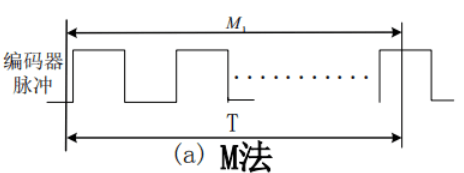
通过测量一段固定的时间间隔内的编码器脉冲数来计算转速,使用与高速场合。
设在固定时间T内测得的编码器脉冲数为M1,则转速 \(N=\frac{60M_1}{PT}\) ,其相对误差为 \(|\frac{\Delta N}{N}|=|\frac{\Delta M_1}{M_1}|\)
当速度越慢时,相对误差越大。
2.T法
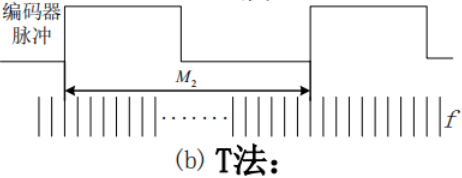
通过测量编码器两个相邻脉冲的时间间隔来计算转速,适用于速度比较低的场合,当转速较高时其准确性较差。
转速\(N=\frac{60f}{PM_2}\),其相对误差为\(|\frac{\Delta N}{N}|=|\frac{\Delta M_2}{M_2 +\Delta M_2}|\approx \frac{\Delta M_2}{M_2}\)
3.M/T法
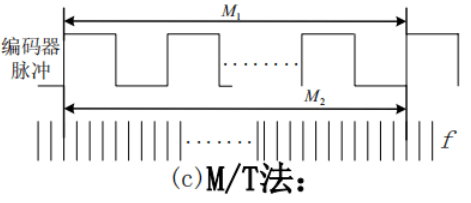
"M/T法"是前两中方法的结合,同时测量一定个数编码器脉冲和产生这些脉冲所花的时间,在整个速度范围内都有较好的准确性。
但对于低速情况下,该方法需要较长的检测时间才能保证结果的准确性。
转速\(N=\frac{60f}{P}*\frac{M_1}{M_2}\),式中M1已确定,故其相对误差为\(|\frac{\Delta N}{N}|=|\frac{\Delta M_2}{M_2 +\Delta M_2}|\approx \frac{\Delta M_2}{M_2}\)
通常时钟频率f远大于编码器的输出脉冲频率,因此上面各式中M2远大于M1。
Ⅲ测加速度
加速度测量可以直接使用\(\frac{\Delta V}{\Delta T}\)进行计算,但这样误差较大,可以用多个速度点先进行最小二乘法拟合直线再计算斜率。